Astrobee
NASA Astrobee Robot Software
Overview
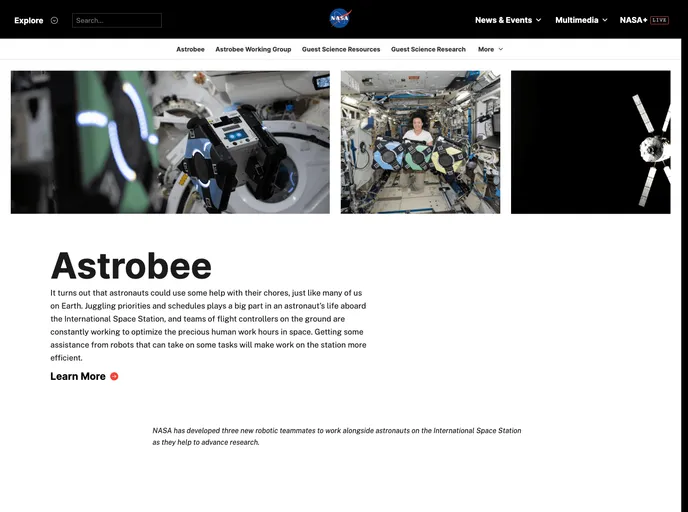
The Astrobee Robot Software is a significant piece of technology that operates free-flying robots inside the International Space Station. Consisting of flight software, a software simulator, and supporting tools primarily written in C++, the Astrobee software enables vision-based localization, autonomous navigation, human-robot interaction, and more.
Features
- Flight Software: Implements vision-based localization, autonomous navigation, docking, and perching.
- Support for Human-Robot Interaction: Includes screen-based displays, light signaling, and sound for communication with astronauts.
- Robot Operating System (ROS) Framework: Utilizes ROS for message-passing middleware.
- Simulator: Built using ROS and Gazebo, allows evaluation without robot hardware.
- Supporting Tools: Includes tools for processing ISS imagery for mapping and more.
Summary
The Astrobee Robot Software is a sophisticated system that powers the operation of free-flying robots within the ISS. With an array of features such as vision-based localization, autonomous navigation, and human-robot interaction, this software provides a high-level API for controlling the robot, multiple operating modes, and a simulator for evaluation without physical hardware. The software's open-source nature and availability of supporting tools make it a valuable resource for researchers and developers in the field of robotics.