Pure Pursuit Simulator
This is a simple simulator I made that lets you simulate the pure pursuit algorithm and get the way points for the algorithm for the Vex Robotics Competition.
Overview
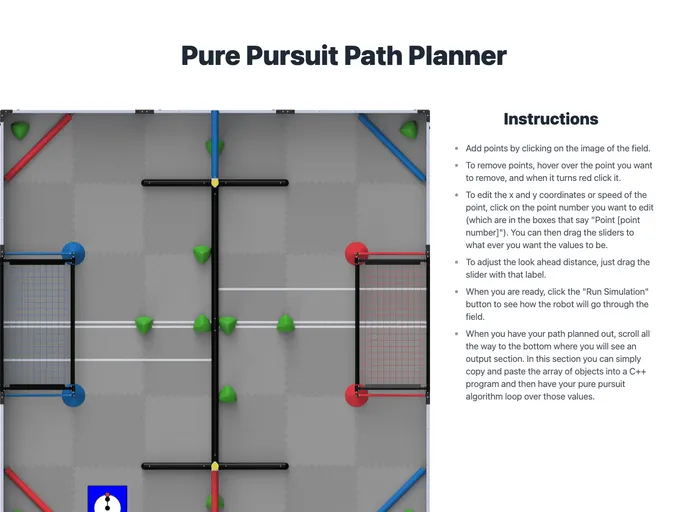
Pure-Pursuit-Simulator is a simple path planner and simulator designed for pure pursuit algorithms in the Vex Robotics Competition. This tool allows users to create paths by adding points and visualize how a robotic vehicle would move on the field. It also provides the capability to make adjustments to the path.
Features
- Path Creation: Users can add points on the image of the Vex Over Under field to create a path.
- Simulation: The simulator enables users to run a simulation where the robot follows the created path.
- Point Adjustment: Each point on the path can be adjusted, allowing users to modify properties of individual points.
- C++ Code Output: The application provides the C++ code output as an object, allowing users to utilize it in their projects.
Summary
Pure-Pursuit-Simulator is a valuable tool for planning and simulating paths for pure pursuit algorithms in the Vex Robotics Competition. With its intuitive interface, users can easily create paths, run simulations, and make adjustments. The upcoming features such as an improved PID controller and options for changing the robot size further enhance the tool's capabilities. With the convenient code output and compatibility with popular libraries like React JS and Tailwind CSS, this simulator offers a comprehensive solution for robotics enthusiasts.
- React

React is a widely used JavaScript library for building user interfaces and single-page applications. It follows a component-based architecture and uses a virtual DOM to efficiently update and render UI components
- Tailwind

Tailwind CSS is a utility-first CSS framework that provides pre-defined classes for building responsive and customizable user interfaces.
- daisyUI

daisyUI adds classes to Tailwind CSS for all common UI components. Classes like btn, card, etc. This allows us to focus on important things instead of making basic elements for every project.